7 Minutes
Úvod: jemnost pohybu a nová úroveň vnímání
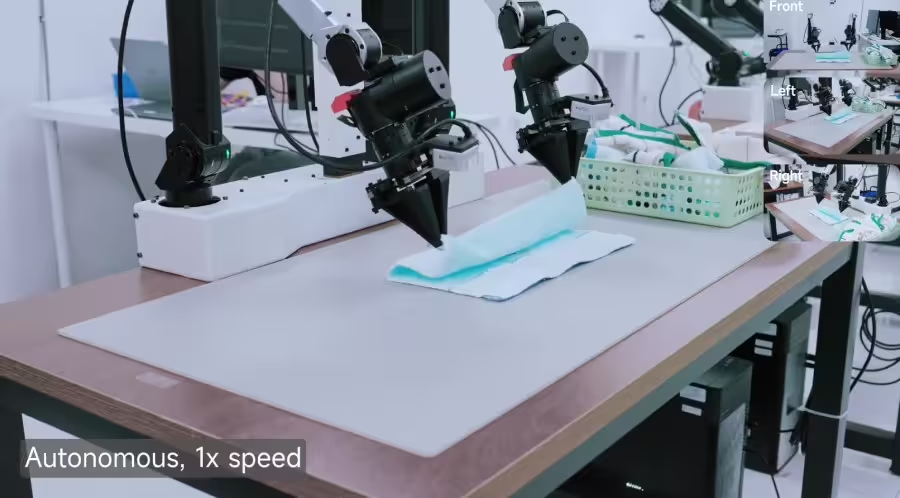
Ručník poskládaný, jako by ho upravovala opatrná lidská ruka. Kostky rozebrané s pevnými, klidnými pohyby. Malé výkony, snad neokázalé, ale výmluvné. Model Robotics-0 od Xiaomi není lesklý spotřebitelský gadget; jde o pokus naučit stroje vidět, rozumět a pohybovat se s takovou úrovní jemnosti, kterou jsme dosud přisuzovali lidsé intuici a zkušenosti.
V jádru se Robotics-0 snaží uzavřít smyčku, která definuje schopného robota: percepce, rozhodování, exekuce. Společnost to označuje termínem „fyzická inteligence“ — stručný výraz, pod nímž se skrývá řada složitých problémů. Jak zachovat ostré schopnosti ve zpracování jazyka a obrazu a zároveň trénovat systém na pohyby přesné na milimetry? Xiaomi na to odpovídá architekturou, která odděluje „myšlení“ od „pohybování“.
Architektura: rozdělení rolí mezi vnímáním a akcí
Vizuálně-jazykový model jako interpret
Na jedné straně stojí Visual Language Model — představte si ho jako robota-interpretátora. Zpracovává vysoké rozlišení obrazových toků z kamer a lidské instrukce, i ty vágní: „Prosím, slož ručník.“ Řeší detekci objektů, prostorové vzájemné vztahy, vizuální otázky a odpovědi (visual Q&A) a ten druh běžného zdravého rozumu, který mění pixely na úkoly. Tento model kombinuje rozpoznávání scén, lokalizaci a semantické porozumění, což umožňuje robotovi přeložit instrukce do reprezentací, jež mohou být použity pro plánování pohybu.
Action Expert: difuzní transformátor pro sekvence pohybů
Druhá složka je Action Expert: Difúzní transformátor navržený ne tak, aby vypustil jediný motorický příkaz, ale aby generoval tzv. „Action Chunk“ — krátkou sekvenci koordinovaných pohybů. Prakticky to znamená plynulejší přechody a méně trhaných korekcí. Místo okamžitého určování jednotlivého kroku systém produkuje malou sérii pohybů, která je provázaná a koherentní, což snižuje jitter a zlepšuje stabilitu při manipulaci s tuhými i měkkými objekty.
Mixture-of-Transformers: důvody pro modularitu
Inženýrská volba za tímto dělením se nazývá Mixture-of-Transformers architektura. Odpovědnosti jsou přiděleny jednotlivým modulům namísto toho, aby vše bylo nacpané do jednoho monolitického modelu. To pomáhá řešit notoricky známý problém: jakmile naučíte vizuálně-jazykový model akci, často ztratí část své schopnosti uvažovat a zobecňovat. Xiaomi tomu předchází společným tréninkem na multimodálních datech a trajektoriích akcí, takže model „udrží hlavu“ ostrou, zatímco se učí, jak pohybovat „rukama“.
Tréninkový postup: vrstvený přístup
Trénink probíhá ve fázích. Nejprve přichází krok nazývaný Action Proposal, kde vizuální model při prohlížení snímku předpovídá rozložení pravděpodobných akcí. To srovnává interní reprezentace vidění a konání a vytváří most mezi vjemem a návrhem chování. Následně se vizuální část „zamrazí“ — zůstane jako stabilní čtecí vrstva.
Poté se Difúzní transformátor učí odšumovat akční sekvence — přeměňuje šumem zasažené odhady na vykonatelné pohyby — a je řízen spíše pomocí klíč-hodnota (key-value) rysů než diskrétních jazykových tokenů. Tento přístup umožňuje Action Expertu pracovat přímo s bohatými, spojitými reprezentacemi pohybu a snižuje závislost na symbolickém překladu, což je důležité pro plynulou robotickou manipulaci.
Praktické výzvy: latence a plynulost pohybu
Skuteční roboti také odhalují praktické třecí plochy. Latence je jedním z klíčových problémů. Když se model „zastaví, aby přemýšlel“, robot často zatuhne nebo zakolísá. Xiaomi to řeší asynchronním inferenčním režimem: výpočetní procesy a hardware běží částečně nezávisle, takže pohyb zůstává kontinuální i když model ještě počítá další kroky. Toto oddělení umožňuje robotu udržet hybnost a plynulost, což je zásadní při manipulaci s rozměrným nebo flexibilním předmětem.
K dalšímu snížení vibrací a trucovitých korekcí slouží zpětnovazební smyčka — systém opětovně vkládá dříve předpovězené akce do běžícího procesu jako tzv. „Clean Action Prefix“, což tlumí jitter a zachovává moment hybnosti. Pozornost (attention) je řízena maskou ve tvaru lambda (Λ), která preferuje aktuální vizuální signály před historickými, čímž se zvyšuje reakceschopnost na náhlé změny v prostředí.

Benchmarky a reálné testy
Benchmarky vyprávějí jen část příběhu. Xiaomi hlásí špičkové výsledky v simulacích LIBERO, CALVIN a SimplerEnv, kde překonali přibližně 30 konkurenčních systémů. Čísla jsou důležitá, ale stejně tak i reálné testy mimo simulace. Na dvouruké platformě si Robotics-0 poradil s úlohami s dlouhým horizontem, jako je skládání ručníků nebo rozebírání kostek, a ukázal stabilní koordinaci mezi okem a rukou, manipulaci s tuhými i flexibilními objekty bez fatálních selhání.
Takové reálné demonstrace potvrzují, že architektura produkuje robustní, opakovatelné chování při manipulaci s předměty rozličných vlastností — od tuhých kostek po měkké textilie. To je důležité zejména pro oblast domácí robotiky a servisní robotiky, kde je potřeba bezpečnost, spolehlivost a schopnost přizpůsobit se nepřesným vstupům a proměnlivému prostředí.
Otevřený zdroj a dopad na výzkum
Další praktický bod je ten, že Xiaomi uvolňuje Robotics-0 jako open source. To má zásadní význam pro rychlost vědeckého pokroku. Když týmy mohou inspektovat kód, replikovat experimenty a navazovat na práci druhých, postup se urychluje. Očekávejte následné články, forky na GitHubu a pravděpodobně rychlé iterace, které aplikují stejné VLA (vision-language-action) principy na odlišný hardware.
Otevřený přístup navíc usnadňuje validaci výsledků, porovnávání metodik a vytváření benchmarků, které jsou méně náchylné k nevhodným porovnáním. Pro akademickou i průmyslovou komunitu je to podnět k rychlé replikaci, křížení nápadů a uplatnění principů Robotics-0 v odlišných kontextech — například v logistice, zdravotnictví nebo v domácnostech s asistenčními roboty.
Omezení a otevřené výzvy
Robotics-0 neřeší všechny problémy. Manipulace s měkkými objekty zůstává technologickou výzvou: deformovatelné materiály mají komplexní fyzikální vlastnosti, které se obtížně předvídají a modelují. Generalizace do výrazně odlišných prostředí je další slabinou — systém, který funguje v laboratorních podmínkách, nemusí bez úprav obstát v chaotickém domácím prostředí se špatným osvětlením nebo nečekanými překážkami.
Plná autonomie také zůstává částečně nedosažitelným cílem: mnoho úloh vyžaduje dlouhodobé plánování, adaptivní rozhodování a bezpečnostní záruky, které jsou nad rámec současného přístupu. Nicméně model naznačuje pragmatický směr: udržet percepci a akci úzce sladěné bez toho, aby jeden modul „sežral“ schopnosti toho druhého. To je připomínka, že pokrok může pocházet z architektonických rozhodnutí stejně jako z nárůstu velikosti modelů.
Technické detaily a kontext pro odborníky
Pro technicky zaměřené čtenáře stojí za zmínku několik klíčových aspektů implementace a tréninku, které dávají modelu jeho silné stránky:
- Společné tréninkové datasetu: multimodální korpusy kombinující video, obrazové sekvence, metriky trajektorií a párové jazykové instrukce zajišťují bohaté supervisory signály.
- Key-value řízení difúze: místo pevné tokenizace akčních kroků Action Expert pracuje s vektorovými reprezentacemi (klíče/hodnoty), které lépe zachycují spojitý charakter motorických trajektorií.
- Asynchronní inferenční pipeline: paralelizace mezi plánováním a řízením hardwaru minimalizuje dopad výpočetní latence na plynulost pohybu.
- Maskování pozornosti typu lambda (Λ): priorizace aktuálních vizuálních vstupů zlepšuje adaptaci na rychlé změny ve scéně.
Tato souborová technická rozhodnutí dává Robotics-0 schopnost jak udržet silné jazykové a obrazové rešerše, tak generovat efektivní a plynulé akční sekvence, které jsou přímo realizovatelné v kontrolních smyčkách robotů.
Konkurenceschopnost a pozice na trhu
Z konkurenceschopného hlediska Robotics-0 vyniká tím, že kombinuje otevřený zdroj s technickou modularitou, která usnadňuje přizpůsobení na různé platformy. Zatímco některé konkurenční systémy sázejí výhradně na masivní monolitické modely nebo proprietární softwarové stacky, Xiaomi se vydává cestou modulárnosti, která může urychlit přijetí a customizaci v průmyslových i akademických aplikacích.
Tento přístup má dvě výhody: umožňuje rychlejší iterace výzkumu (protože ostatní mohou snadno navázat) a zároveň dává výrobcům robotů flexibilitu při integraci s existujícím hardwarem, což je atraktivní pro komerční nasazení v servisu a domácnostech.
Závěr: kam směřuje robotika s vizuálně-jazykovým učením
Pokud vás zajímá, kam se budou roboti pohybovat dál, sledujte, jak se tento model chová mimo Xiaomi laboratoře a které části komunity si rozhodnou ponechat a vylepšit. Příštího domácího robota, který vám uklidí nebo složí ručník, možná poznáte podle hladkých záhybů — a v každém pečlivém ohybu může být stopa po přístupu Robotics-0.
Robotics-0 představuje krok správným směrem: technicky i koncepčně ukazuje, že rozdělení vnímání a akce, společné tréninkové postupy a otevřený přístup mohou urychlit praktickou robotickou inteligenci schopnou bezpečné a jemné manipulace. To dělá z Robotics-0 důležitý projekt pro vývoj domácích asistentů, průmyslových manipulátorů a dalších aplikací robotiky založené na vizuálně-jazykovém rozhraní.
Comments
No comments yet.
Leave a Comment